|
Zurück zu |
|||
|
|||

 |
||||
|
Antrieb der Kirchenglocke durch konventioneller Technik, mit einem “Drehstrommotor”. |
||||
|
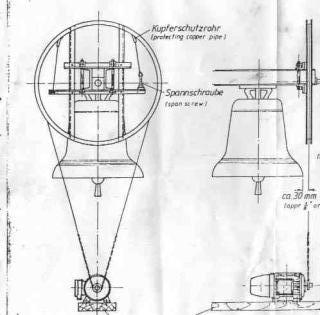
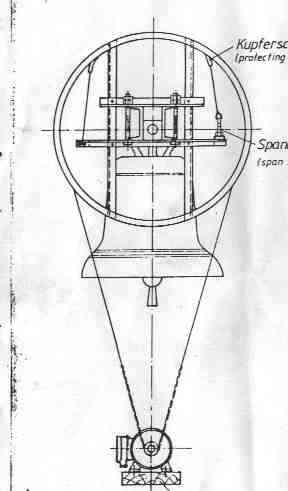
An dem Glockenjoch ist für diese Antriebsart ein Rad befestigt, das einem Speichenrad ähnlich sieht. Es ist das sogenannte Seilrad. Auf der Radlauffläche ist eine Spannvorichtung befestigt sind, an die ein Drahtseil, welches mit einer Kette verbunden, angeschlossen ist. Die Kette läuft dann über ein Zahnritzel am Motor wieder zurück zum Rad, wo das Ende wieder mit Drahtseil fixiert ist. Der Motor zieht die Glocke über eine Steuerung nach rechts und links. Doch dazu gebe ich später eine ausführlichere Beschreibung. Es gibt aber auch Seilräder, wo die Spannvorrichtung sich im Seilrad selber befindet, wie unten auf dem Bild zu erkennen ist. Beide Versionen sind gängige Typen. |
||||
|
Hier sehen Sie eine gezeichnete Glocke mit einem angebauten Seilrad. Die Schwierigkeit dabei ist, das Rad genau zentrisch zum Mittelpunkt der Drehachse vom Holzjoch zu montieren. Die Verbindung zwischen Kette und Motor, die zum Motor führt, wird Unterzug genannt. |
 |
 |
|
|

|
Jetzt müssen wir uns etwas mit Elektrotechnik beschäftigen. Man benutzt zum Antrieb von Glocken Drehstrommotoren. Dabei handelt es sich um Dreiphasenwechselspannungs - Asynchronmaschinen, die wir als Begriff einmal einfach so hinnehmen müssen. Der Begriff Dreiphasenwechselspannung hat sich im Laufe der Jahre im Volksmund als "Drehstrom" etabliert, was sachlich aber falsch ist, da sich an dem Strom selber nichts dreht. Es ist so ähnlich wie mit den Sternsingern, die *C+M+B* an die Tür schreiben: Caspar -Melchor-Baltasar heißt es fälschlich im Volksmund. Richtig ist: Christus mansionem benedicat. Aber was der Bauer nicht kennt, ißt er nicht. Also reden wir nach der Volksweise vom Drehstrom(asynchron)motor. Einen Drehstromanschluß hat jeder von uns im Keller, da das EVU (Elekroversorgungsunternehmen ) mit dem “Vierleiternetz” ins Haus kommt. |
|
|
|
|
|
|
|
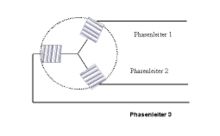
Die elektrische Spannung wird dadurch erzeugt, daß sich im inneren des Kreises ein Magnetfeld / Dauermagnet dreht. Siehe auch schon nächstes Bild “Kraftwerksmodel”. Jede Spule hat zwei Enden. Von jeder Spule wird jeweils eine sogenannte Ader als Phasenleiter 1, Phasenleiter 2 und Phasenleiter 3 herausgeführt. Die zweiten Spulenenden sind miteinander im Generator verbunden und bilden die sogenannte Betriebserde, auch Neutralleiter genannt und ist mit dem Erdreich verbunden. Phasen werden meist mit braun und schwarz isolierten Adern angeschlossen und der Neutralleiter bis zum Zählerkasten im Haus mit grün-gelb. Ausnahme: - hier im Versuch im nächsten Bild - mit Rot - Neutralleiter im Versuch als blau. Im Hausanschluß wird er dann ab dem Zählerkasten als blau isolierte Ader weiter geführt. Mehrere Adern zusammen bilden dann ein Kabel. Die blaue Ader zwischen Kraftwerk und Hausanschluß im Versuch ist symbolisch für das Erdreich zu verstehen. |
|
|
||||||||||||||||||||
|
|

|
Zwischen den Adern Phase 1,Phase 2 und Phase 3 - also die roten Adern, ist eine Wechselspannung von 400 Volt. Das ist der sogenannte Drehstrom, auch bekannt als Kraftstrom und findet sich zum Beispiel in der Küche an einem Herdanschluß wieder. Zugleich ist hier auch noch eine blaue Ader, der spannungslose Neutralleiter und ein grün-gelber, die sogenannte Hauserdung für die Schutzmasnahme VDE 0100-Teil 410, vorhanden. Diese Ader ist ebenfalls spannungslos und mit dem Fundamenterder des Gebäudes verbunden bzw direkt mit dem Metallgehäuse des Elektroherdes. Ein Fehlen dieser Erdung kann lebensgefährlich sein. Zwischen einer Phase 1 oder 2 oder 3 und dem blauen Neutralleiter hingegen, befindet sich aber nur eine Wechselspannung von 230 Volt. Diese finden wir in unseren normalen Steckdosen im Haus, wo der Staubsauger oder die Stehlampe angeschlossen wird. Die dritte Ader in grün-gelb ist wieder die Hauserdung. Diese niedrigere Spannung wird im Volksmund als “Lichtsrom” bezeichnet, weil damit die Deckenlampen betrieben werden. Fachlich natürlich wieder totaler Unfug!! Kraftstrom fließt also immer zwischen den Phasen und Lichtstrom zwischen Phase und Neutralleiter. Da aber der Neutralleiter am Kraftwerk und am Haus mit dem Erdreich verbunden ist und dieses elektrisch leitet - wegen dem darin befindlichen mineralisiertem Wasser - , sieht man als Transportleitungen für die erzeugte elektrische Energie an Hochspannungsmasten etc immer nur drei Kabel: Phase 1, Phase 2 und Phase 3. Die Rückleitung für den Lichtstrom ist das Erdreich. Sollten sie dennoch einmal Überlandleitungsmasten mit 4 Adern sehen, so handelt es sich um separat erzeugten Bahnstrom mit 16 2/3 Herz: Eine Leitung hin und eine Leitung zurück zur Trafostation, die das Bahnnetz versorgt, wo dann der Neutralleiter wieder geerdet ist. Ein “Drehstromkabel” hat die Farben: schwarz-schwarz-braun-blau-grün/gelb - alte Norm schwarz-braun-blau-grau(Neutral)-rot(Erde) und ein “Lichtstromkabel”: schwarz oder braun-blau-grün/gelb bzw. alte Norm schwarz-grau-rot. Ausdrücklicher Hinweis: |
|
Der Drehstromasynchronmotor |
|||||
 |
|||||
|
Drei spannungsführende Drehstrom-Phasen L 1-2-3 werden an den Motor angeschlossen. Zur Umkehr der Drehrichtung werden zwei Phasen, z.B. 2+3 an den Motorklemmen U1-V1-W1 vertauscht angeschlossen,
wie bei K2 dargestellt. |
|||||
 |
|
Bei Bestromung der drei Spulen mit “Drehstrom”, fängt der Ring in der Mitte an, sich zu drehen. Folglich braucht man nur das ganze in ein gutes Gehäuse zu verpacken und schon ist der Drehstrommotor fertig. ( Siehe Bild ). Das drehende Teil nennt man Läufer und das feste Teil, indem die Wicklungen liegen, Ständer. |
 |
|
Eine ganz wichtige und für die Glockentechnik entscheidende Eigenschaft dieser Drehstromasynchronmotoren ist, daß sie immer auf ihre Drehzahl kommen wollen. Schaffen sie das nicht und laufen längere Zeit untertourig - warum auch immer - so werden die Motoren heiß und gehen kaputt. (Lensche Regel - Induktionsverhalten, mangelhafte Gegeninduktion im Ständer > zu hoher Strom durch die Wicklungen > große Wärmeentwicklung > Isolation schmilzt > Kurzschluß ) Folgende Drehzahlen pro Minute werden gebaut: 3000, 1500, 1000, 750, 600, 500 und 425. Das geschieht durch verschiedenartige Anordnung mehrerer parallel geschalteter Wicklungen im Ständer. Ein Motor, der für eine Umdrehungszahl gebaut wurde, wird diese sein ganzes Motorenleben auch behalten, sofern er an einem 50Hz Netz aus der Steckdose betrieben wird. Um den Antrieb einer Kirchenglocke mit Drehstromasynchronmotor zu verstehen, setzen wir uns jetzt mit den einzelnen Komponenten auseinander und fragen nach: |
|
Wie groß darf denn überhaubt das Seilrad sein ? |
|||
|
Wie wird die Glocke überhaubt gesteuert ? |
|||
|
Warum schaukelt die Glocke nicht immer höher bis zum Überschlag ? |
|
Wie stark darf der Motor sein ? |
|
|
|
Vom Motor aus ist die Übersetzung der Motorkraft auf das Seilrad von klein auf groß und geht darum entsprechend leicht. Von der Glocke zum Motor betrachtet, ist die Übersetzung von groß auf klein. Was vom Motor aus leicht zu drehen geht, ist anders herum aber viel schwerer. Das ist eine physikalische Tatsache. Die Glocke muß dann Arbeit an dem Motor verrichten. Das bedeutet aber, die Glocke verliert wegen dieser umgedrehten Übersetzung von groß auf klein an Schwungenergie und wird abgebremst, sobald der Motor abschaltet. Je größer dabei das Seilrad ist, desto größer ist dieser Bremseffekt. Andersherum wieder, wird es dann für den Motor um so leichter, die Glocke zu ziehen. Das ist wiederum von Vorteil, weil man so Motorleistung sparen kann. Zugleich wächst aber zwangsläufig auch der Einfluß der Maschinenkraft auf die Glockenschwingung. |
|
Die Antwort auf die Seilradgröße liegt somit letztlich hauptsächlich in der Definition, wie man eine Glocke zu läuten hat. Je größer das Rad, desto abhängiger ist die Glockenschwingung vom Motor. Frage: Soll der Motor läuten oder soll die Glocke so läuten, als hätte sie keinen ? Wenn der Motor läutet, dann muß er die Glocke so ziehen, daß er ihr zeigt, wo es lang geht. Doch damit wird der Klöppel regelrecht an den Schlagring der Glocke geschleudert. Das kann man anhand einer kleinen Tischglocke nachvollziehen. Hier schütteln wir mit der Hand die Glocke und schleudern damit den Klöppel hin und her. Betrachten wir dabei mal das Verhalten des Glockenklöppels, so stellen wir fest, daß der Klöppel dabei sehr lange an dem Schlagring kleben bleibt, weil Sie mit der Hand den Glockenmantel führen. Zum einen schubsen sie den Klöppel mit der einen Glockenwandung an und bremsen anschließend massiv ab. Dadurch knallt der Klöppel an den Schlagring der anderen Seite, bleibt deshalb am Schlagring kleben und dämpft den Klang. Das gleiche kann man auch mit der Kirchenglocke machen, wenn man das Seilrad groß genug dimensioniert. Kein Problem. Es entsteht aber kein sauberer Klang als im Vergleich dazu, wenn sie den Klöppel nur einmal kurz mit einem Finger anschubsen und dieser dann den Schlagring nur “küssen” tut. Hier hören sie den Unterschied: Das geführte Läuten mit der Hand gleicht eher einem Geschelle als der “Kuß” des Klöppels am Schlagring, mal ganz abgesehen von Materialverschleiß und vorzeitiger Abnutzung. Übertragen wir nun diese Verhältnisse auf die große Schwesterglocke im Kirchturm, so ist es vom klanglichen und denkmalschutzrechtlichen Aspekt her sinnvoller, die Glocke in ihrer natürlichen Schwingung zu belassen und von der Vorstellung Abschied zu nehmen, daß der Motor läutet. Darum müssen wir sozusagen die Antriebstechnik der Glocke “ in Watte “ packen Es darf darum das Seilrad nur so groß gemacht werden, daß der Bremseffekt in dem Bereich, wo die Glocke ohne Motorkraft schwingt, vernachlässigbar klein wird. Jedoch ist hier, auf Grund einer technischer Grenze, die vom Motor her ausgeht, eine gewisse Seilradmindestgröße erforderlich. Diese Grenze liegt nicht, wie man annehmen könnte, in der Kraftübertragung, daß ein zu kleines Rad eine Motorleistung erfordert, die man nicht mehr bereitstellen kann, sondern in der Drehzahl des angebauten Motors, bzw in der technisch machbaren Baugröße und der inneren Nutenanzahl des Ständers. In der Praxis hat sich herausgestellt, daß Asynchronmotoren mit einer Drehzahl von 500 Umdrehungen pro Minute, sogenannte 12-polige Drehstrommotoren, den günstigsten Kompromiß präsentieren, im Bezug auf Seilradgröße mit geringer Bremswirkung und technisch akzeptabler Baugröße sowie erhöhtem Kraftaufwand, der vom Motor geleistet werden muß, als bei z.B. 1000 Umdrehungen pro Minute, wo dann auch das Seilrad wieder größer ist mit einer dann wieder erhöhten Bremswirkung auf die Glockenschwingung. Bei der Motorendrehzahl mit 500 Umdrehungen pro Minute ( UpM ) ist das am Joch angebaute Seilrad mindestens so groß, wie der Schärfendurchmesser der Glocke. Die maximale Größe liegt hier bei “Schärfendurchmesser + 15 % “ Ebenfalls ein Vorteil, um Seilräder für den Antrieb schnell und einfach anzupassen oder zu überprüfen. |
|
An welcher Stelle und wie lange soll der Motor eingeschaltet werden ? Um eine Glocke am läuten zu halten, müssen nur die Reibungsverluste aufgehoben werden. Sie läutet am schönsten, wenn dabei keine großen Kräfte die Schwingung beeinflussen. Aus der Praxis weiß jeder Glöckner, der das Handläuten beherrscht, daß eine Glocke, ab Wendepunkt gezogen, am besten schlägt. Wollen sie dieses nun automatisieren, so ist dieser Erfahrungspunkt der alten Glockenläuter auch zugleich Ausgangspunkt für die Definition der ersten Steueraufgabe: Einschalten des Motors
am Wendepunkt der Glocke. Da aber zum Läuten nur der Reibungsverlust in den Lagern aufgehoben und die Glocke nicht gerissen werden darf, brauchen sie einen Motor, der im Stillstand wesentlich schwächer ist, als auf
dem Typenschild an Nennleistung angegeben. - ähnlich wie Diesel und Benzinmotor im Vergleich. Grundsätzlich gibt es drei Läufertypen: 1) Widerstandsläufer Diese haben im Stillstand eine Kraft, die zwei bis dreimal größer ist, als auf dem Typenschild bei Nendrehzahl angegeben. Das Drehmoment verläuft inversibel zur Drehzahl. Diese Motoren werden an Glocken engesetzt, weil selbst tonnenschwere Glocken innerhalb kurzer Zeit hochgeläutet werden. Um ein Reißen zu vermeiden, liegt die Ein-Auschaltung kurz vor und hinter dem Nullduchgang. Die Glocke wird mit einem Impuls am läuten gehalten, was aber, nach meiner Erfahrung, die Schlagringe kaputt macht. Solche Läufer dürfen in Glockenmotoren nicht mehr eingestzt werden. Vorsicht bei allen Motoren, die eine grüne Farbe haben. Diese dürfen sie nicht ab Wendepukt der Glocke eingeschaltet werden, sondern erst kurz vor dem Nulldurchgang !! 2) Rundstabläufer Dieser Läufer entwickelt , im Ständer eingebaut, folgendes Verhalten: Ganz schwache Kraft im Anlauf, die mit steigender Drehzahl stärker wird und bei Nenndrehzahl ihr Maximum erreicht. Übertragen auf die Glocke bedeutet das, sie können den Motor im Wendepunkt einschalten. Um ein Aufschaukeln der Glocke zu verhindern, müssen sie ihn bis hinter den Nulldurchgang auch eingeschaltet lassen, was nicht schlimm ist, da die Kraft proportional zur Drehzahl ansteigt. Danach kann man den Motor wieder abschalten und die Glocke schwingt frei nach oben aus. Dieses erreicht man durch die Verwendung von Zeitrelais, die in Abhängigkeit zur Glockenschwingung über einen am Motor angebrachten Steuerschalter die Wendeschütze schalten. Diese Antriebsart nennt man auch “ offen geregelt “. Eine weitere Möglichkeit ist das erfassen der Wegstrecke über sog. inkrementale Meßwertgeber, die man am Glockenjoch oder am Motor montiert, wo die Steuerung mit korospondiert. In der Steuerung ist dann mittels Programmiergerät eine Wegstrecke vorgegeben, inder der Motor die Glocke ziehen soll. Der Messwertgeber liefert dann die Information, wo die Glocke steht und danach werden dann die Wendeschütze geschaltet. Diese Antriebsart nennt man dann“ geschlossen geregelt “ . Generell ist eine geschlossene Regelung immer besser als eine offene Regelung. Jedoch benötigen sie bei einer geschlossen geregelten Steuerung immer wieder den Kundendienst, da der einfache Elektriker nichts an der Anlage machen kann, wenn was nicht funktioniert. Zudem können bei Ausfall von Sensoren Unfälle wie in der Frankfurter Paulskirche passieren. Daher müssen diese Läutesteuerungen mechanisch gegen überhöhte Schwingungswinkel gesichert werden. Zudem sind mit diesen Regelungen Sachen möglich die ich nicht gutheißen kann, wie der Einsatz von hochtourigen Motoren an nicht angepaßte Seilräder, um Geld zu sparen und die Maschine schön billig zu machen. Darum bin ich kein Freund von diesen Anlagen und stufe sie eher als potentiell gefährlich ein. Besser ist da , wegen der einfachen Bauweise und sicherem Betrieb, die offene Regelung mit Zeitrelais. Sie ist servicefreundlich und kann vom Dorfelektriker repariert werden. Faustregel: Eine gute Läutemaschine mit 500 tourigem Motor kostet 2500 Euro. Alles andere darunter ist kritisch zu betrachten ! 3) Stromverdrängungsläufer Diese Läuferart entwickelt im Stillstand ein Drehmoment, was ca. 1/3 unterhalb des Drehmomentes bei Nenndrehzahl liegt. Damit wird die Glocke ab Wendepunkt gerissen, sofern sie nicht wieder kurz vor Nulldurchgang schalten. Somit ist dieser Läufer auch keine gute Lösung. Man kann diesen Motortypus allerdings al Hilfsmotor im Hochläuten von besonders schweren Glocken mit einem Gewicht von mehr als 5 Tonnen verwenden, der dann nach erfolgtem Hochläuten abgeschaltet wird. Fazit: Rundstabläufer, die sie vorzugsweise in alten Motoren finden oder in neuen Motoren mit kleinen Leistungen, haben die besten Eigenschaften für ein schonendes Glockenläuten und die offene Regelung bringt die beste Sicherheit beim Läuten. |
|
Warum schaukelt die Glocke nicht immer höher bis zum Überschlag ?? |
|
|

|
|

|
Nun denken sie mal an die auf dem Typenschild eines Motors angebene Drehzahl, die man fachlich als Nenndrehzahl bezeichnet und an die Kraftübertragung, die er dabei macht. Zum besseren Verständnis machen wir machen dafür ein virtuelles Experiment. Sie wollen mit einem Auto von einer Bergalm eine Straße runterrollen, die durch eine gerade Talsole führt und dann wieder zu einer zweiten Bergalm hinaufrollen, die in gleicher Höhe liegt, wie die erste. Der Weg ist also wie eine halbe Kreisbahn oder einer Halfpipe vom Skaterclup. Sie sitzen am Steuer, haben die Kupplung durchgetreten, ebenfalls dazu zur Hälfte das Gaspedal und den zweiten Gang eingelegt. Damit ist die Drehzahl des Motors und das Übersetzungsverhältniss festgelegt. Auf unsere Glocke übertragen bedeutet das: Wir haben uns für einen Motor mit einer Drehzahl x und für eine Seilradgröße y ( Übersetzung ) entschieden. Zurück zum Auto. Sie rollen nun den Berg hinunter. In dem Moment, wo das Auto auf die gerade Talsohle fährt, lassen sie für 1 Sekunde die Kupplung los. Das ist der alles entscheidene Moment: Ist die Drehzahl der Autoreifen identisch mit der übersetzten Drehzahl des Motors, so werden sie die zweite Alm erreichen. Es erfolgt keine Kraftübertragung. Das Auto fährt wieder genau so hoch, wie es vorher auf der ersten Alm gestanden hat. Naja, fast so hoch, um genauer zu sein und bevor sich hier ein Physiklehrer beschwert, da wir unterwegs noch Reibungsverluste haben. Aber tun wir mal so, als wären die Bedingungen ideal, Reibung = 0. Auf die Glocke bezogen heißt das dann: Wir schalten im Nulldurchgang den Motor für eine Sekunde ein. Ist nun die übersetze Drehzahl des Seilrades zum Motorläufer mit der auf dem Motortypenschild angegebenen Nenndrehzahl x identisch, so schwingt die Glocke wieder genau so hoch, wie zuvor. Die Bremswirkung der Übersetzung lassen wir dabei mal weg und denken nicht weiter daran. Jetzt wiederholen wir unser gedachtes Experiment mit dem Auto an der Bergalm. Es steht wieder genau so, wie bei unserem ersten Experiment. Sie sitzen wieder am Steuer, haben wieder das Gaspedal halb durchgetreten, diesmal aber bei getretener Kupplung den dritten Gang eingelegt anstatt den zweiten und nun rollen sie wieder los. Wenn sie diesmal auf der Straße wie vorher an der gleichen Stelle für eine Sekunde die Kupplung loslassen, dann wird der Wagen zusätzlich beschleunigt und er rollt nach durchfahren der Talsohle den Berg höher hinauf, als vorher. Warum ??? Antwort: Die übersetzte Drehzahl des Motors war nicht identisch mit der Drehzahl der Autoreifen. Die Reifen drehten langsamer. Da aber der Automotor genau so wie der Asynchronmotor auf seine Drehzahl kommen will, hat er zusätzliche Kraft übertragen und damit den Wagen zusätzlich beschleunigt, was bewirkt, daß das Auto den Berg höher hinauf fährt und sie die zweite Alm verfehlen. Das Auto wird, bei Wiederholung des Experimentes, dabei solange immer höher fahren, bis das die übersetzte Drehzahl des Automotors wieder identisch ist mit der Reifendrehzahl in dem Moment, wo sie durch die Talsohle fahren und die Kupplung für eine Sekunde loslassen. |
|
|
|
Wie groß ist das Kettenrad zu wählen ? Die verwendete Zähnezahl liegt in der Regel zwischen 12 und 18, wobei die gängigsten 14 und 16 Zähne sind bei KR 1/2 x 5/16 Zoll und einem Motor mit 500 UPM. Sofern eine Korrektur des Schwingungswinkels erforderlich ist,wechselt man am Motor das Kettenrad gegen eines mit einer anderen Zähnezahl aus. Das bedeutet: Von 14 auf 16 Zähne läutet die Glocke höher, weil das Kettenrad mit 16 Zahnen größer ist als das mit 14 Zähnen und von 14 auf 12 Zähne läutet die Glocke niedriger, weil das Kettenrad mit 12 Zähnen kleiner ist, als das mit 14 Zahnen. |
|
Wie stark muß ein Glockenmotor sein ? 15 kg - 0,03 KW 30 kg - 0,09 KW 50 kg - 0,12 KW, 100 kg - 0,18 KW, Das gilt aber nur beim Antrieb kleinerer Glocken mit diesem Motor, da große tonnenschwere Glocken mit geringerem Schwingungswinkel geläutet werden. 1200 kg - 0,75 KW, 2000 kg - 1,1 KW, 3000 kg - 1,9 KW. Das sind aus der Praxis entnommene Werte für Motoren mit 500 UpM. Dabei ist aber auf eines zu achten: Die angegebene Leistung auf dem Motorenschild in KW, ist abhängig von einer Drehzahl. Diese Drehzahl pro Minute, auf die sich die abgegebene Leistung bezieht, wird Nenndrehzahl genannt. Die angegebene Leistung in KW, ist nicht die elektrische Anschlußleistung, nach der ich meine Sicherungen und Kabelquerschnitt auszusuchen habe, sondern die bei der Nenndrehzahl zur Verfügung stehende Leistung auf der MOTORWELLE ! Die elektrisch aufgenomme Leistung liegt um einiges höher: S=U x I x 1,73 . |
|
Der 2-Phasenlauf: Die beste Antriebsart Die zur Zeit beste Alternative zur modernen Elektronik, aber auch zum Handläuten, ist der 2-Phasenlauf: Über eine Schaltmechanik wird in Abhängigkeit zur Glockenschwingung immer eine Phase zugeschaltet und weggeschaltet. Ist die Glocke zu 70 Prozent hochgeläutet, bleibt diese 3. Phase dauerhaft weggeschaltet und der Motor läutet die Glocke auf zwei Phasen weiter. Diese Antriebsart ist aus meiner Erfahrung heraus, die beste, welche jemals gebaut wurde. Zudem sind diese Läutemaschine nahezu wartungsfrei und besitzt keine Verschleißteile. Daher habe ich dieses alt bewährte Prinzip, was über 40 Jahre lang von der Firma Diegener und Schade in Dorsten gebaut wurde, weiterentwickelt. Zum Hochläuten wird eine Wendeschützschaltung als Anlaufschaltung verwendet, wo Zeitrelais die Einschaltzeit des Motors ab Wendepunkt bis hinter Nulldurchgang begrenzen, so daß der Motor, 500UpM mit Rundstabläufer, die Glocke bis etwas dahinter beschleunigt. Nach erfolgtem Hochläuten der Glocke, wird die Wendeschützschaltung abgeschaltet und mittels eines dritten Schützes der Motor dauerhaft an zwei Phasen gelegt. Danach pendelt die Glocke mit konstanter Läutehöhe, bezogen aus der Netzfrequenz stoßfrei weiter Technische Erklärung: Bedingt durch das elliptische Drehfeld im Motor, hat er am Wendepunkt der Glocke keine Kraft. Erst im Rückfall nimmt, durch die Kraft des abschwingenden Glockengewicht verursacht, mit steigender Drehzahl auch seine Kraft zu. Das ist eine weitere Eigenschaft des elliptischen Drehfeldes. Seine Nenndrehzahl erreicht er dabei garantiert im Nulldurchgang der Glocke und nicht, wie sonst möglich, davor oder dahinter, weil er dauerhaft eingeschaltet ist. Dabei ist er so dimensioniert, daß er, durch das hinter dem Nulldurchgang diesmal aufschwingende Glockengewicht verursacht, wieder mit fallender Drehzahl an Kraft verliert und kraftlos im Wendepunkt endet. Das zum Läuten erforderliche Drehmoment wird also absolut stoßfrei produziert und liegt mit seinem Maximum im Nulldurchgang der Glocke, wo es auch hingehört. Der Motor arbeitet also von sich aus in Abhängigkeit zur Glockenschwingung ohne eine störanfällige Regelung. Den Schwingungswinkel der Glocke kann man bei dieser Antriebsart elektrisch nicht verändern, weil der Motor seine Nenndrehzahl aus der Netzfrequenz bezieht. Die ist aber bekanntlich auf 50Hz festgelegt, absolut stabil und somit bleibt auch die Schwingungshöhe der Glocke gleich. Eine Veränderung ist also nur mechanisch mit der Übersetzung Kettenrad -Seilrad möglich. Somit kann kein unerfahrener Elektriker in den Schwingungswinkel eingreifen Der stoßfreie Antrieb, die selbsttätige Einstellung und Proportionalität von Drehzahl und Drehmoment, der einfache Aufbau mit handelsüblichen Komponenten der Firma Siemens sowie der sichere Betrieb bei konstanter Läutehöhe ohne Abwurfelemente, sind die einschlägigen Vorteile dieses Systemes. Der einzigste Nachteil, den ich festgestellt habe, ist der etwas höhere Stromverbrauch durch die ständige Einschaltung der 2 Phasen beim Läuten. Im Vergleich zu meinen Mitbewerbern schaffe ich durch mein System den stoßfreien, sicheren Antrieb ohne komplizierte Elektronik, durch den Einsatz altbewährter elektromechanischer Bauteile von Siemens. Dieses Läutesystem arbeitet nach dem alten Bauhausprinzip: Gut ist einfach und einfach ist gut.
|
 |